적도의 관측을 하다
작년 11월 경위대 메인의 고투 마운트 AZ-GTi를 구매했고, 6개월만에 적도의 모드를 성공했다. 날씨가 좋았던 주말, 이런 저런 일정 때문에 관측을 갈 상황은 못됐고, 그런다고 이 기회를 날리기에는 너무...

작년 11월 경위대 메인의 고투 마운트 AZ-GTi를 구매했고, 6개월만에 적도의 모드를 성공했다. 날씨가 좋았던 주말, 이런 저런 일정 때문에 관측을 갈 상황은 못됐고, 그런다고 이 기회를 날리기에는 너무 아까웠다. 그런데 며칠 전(5/15) 촬영에서 막대 나선은하, 머리털 은하단 촬영을 성에 차게 하지 못하고는 현타가 좀 씨게 왔다.
이것저것 예쁘게는 못 봤어도, 보기는 봤던지라 더 이상 궁금한 대상도 없고, 보고 싶은 것도 딱히 없던 토요일 밤. 그러나 문득 떠오른 그 동안 미뤄왔던 적도의 모드 셋업. 이미 알리에서 적도의 개조용 wedge도 샀고, 고질적인 도브테일 플레이트 고정나사 간섭 때문에 무두나사도 몇 개씩이나 사서 결국은 최적의 것을 찾아는 놨었다.
일전에 베란다에서 NINA로 (북극성 없이도 할 수 있는) All-sky Polar Alignment도 해봤는데, 결국 베란다 시야가 좁고, 건너편 아파트가 주요 포인트를 가리는 등으로 이유로 플레이트 솔빙에 번번히 실패하면서 결국 "포기"했던 기억도 있다.
하지만 오늘은 결국 야외에서 성공했고, 기념으로 조건들도 정리해볼까 한다.
적도의 모드 펌웨어 설정 및 Right-arm 형태로 경통 달기
스카이와쳐 홈페이지에 들어가서,
- 다음 링크의 파일을다운로드 한다: Windows program: Motor Controller Firmware Loader - WiFi, Version 1.88, Firmware: MC029 for the AZ-GTi, Right Arm, AZ/EQ Dual Mode, Version 3.54
- AZ-GTi를 켜고, 윈도우 피씨를 가대에서 제공하는 와이파이 SSID (SynScan Ed어쩌구...)에 연결하고,
- Firmware Loader를 실행해서 연결확인하고, 압축해제 된 Firmware를 업데이트한다.
- 이제는 Right-Arm형태로 경통을 가대에 부착한다.


Sky-Watcher 5인치 반사와 Askar FMA180 Pro에 장착한 모습. AZ-GTi Payload 제약(<5kg)때문에 5인치 반사에서 잘 동작할지는 미지수다.
AZ-GTi 웨지 모드 사용 시 주의점 세 가지
AZ-GTi를 Sky-Watcher EQ 웨지에 올려 적도의 모드로 사용하려면, 매뉴얼만 보고서는 알기 어려운 세 가지 사항을 미리 짚고 가야 한다.
1. 수평은 풀 페이로드 상태에서
삼각대 수평을 빈 상태로 잡으면, 막상 마운트와 경통, 카메라까지 모두 올렸을 때 무게로 인해 미세하게 기울어진다. 특히 무거운 경통이나 비대칭 페이로드일수록 차이가 커진다. 그래서 삼각대 위에 LP-64 레벨링 베이스를 끼우고(아래는 삼각대 또는 히프피어, 위는 웨지), 모든 장비를 결합한 최종 상태에서 수평을 맞춘다. LP-64는 처음에 사놓고 용처가 딱히 없어(경위대 식 운용시에는 내 환경에서 그렇게 민감하지 않아서 사실 대충 썼고 필요하면 삼각대 길이를 조절하면서...-_-;;) 안 달고 썼는데, 적도의에서는 필수가 아닐까 싶다. 워낙 경통+무게추 등 핸들링할 무게가 많아, 삼각대 다리길이를 수동으로 조절하는 것은 거의 불가능 하므로, 이런 게 필요하다.
2. 웨지 도브테일 고정나사 → 무두 육각나사로 교체
Sky-Watcher EQ 웨지(Star Adventurer용)의 도브테일 클램프 고정나사는 헤드가 크다. 원래 이 웨지는 Star Adventurer 트래커용으로 설계되어 적경(RA) 방향으로 마운트 본체가 회전하지 않기 때문에 문제가 없지만, AZ-GTi는 적도의 모드에서 본체가 RA축을 따라 360° 회전한다. 이때 나사 헤드와 마운트 바디가 간섭을 일으켜 회전이 막힌다.
해결책은 간단하다. 기존 나사를 빼고 M8 × 25mm 무두 육각나사(set screw)로 교체한다. 헤드가 없으니 바디와 충돌할 일도 없고, 6각 렌치로 충분히 단단하게 조일 수 있다. M8 클램핑 레버를 써보기도 했으나 그거 역시도 나의 BK130PDS 경통과는 간섭이 있어, 결국 가장 깔끔한 해법은 무두 나사다.



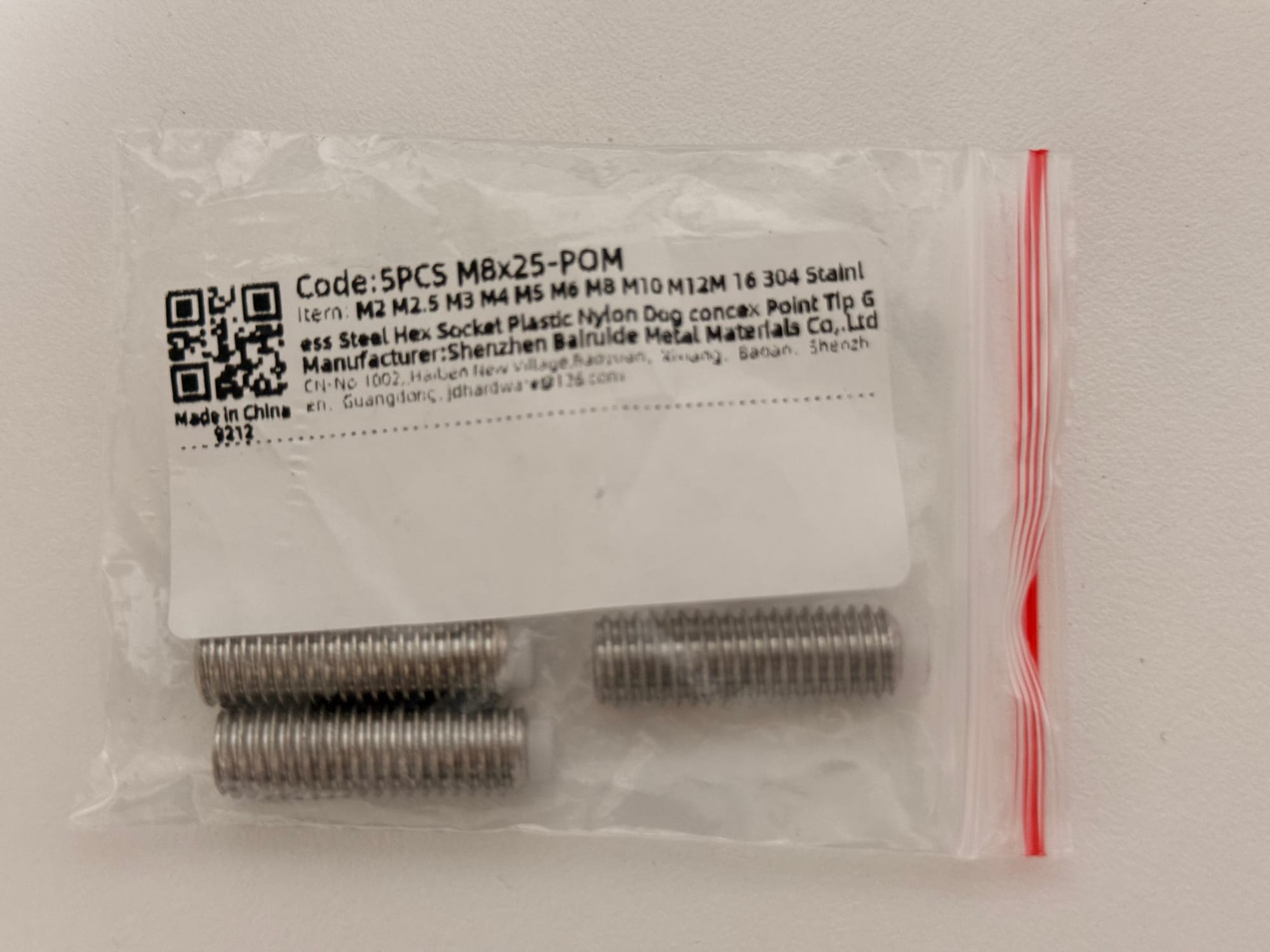
나일론 팁이 붙어있는 M8 육각나사가 젤 낫다
3. 웨지 적위 게이지는 (90° − 위도)로 설정
이 부분이 가장 헷갈리는 지점이다. 화성시 위도가 약 37°라고 해서 웨지 게이지를 37°에 맞추면 경통이 북극성보다 한참 위를 향하게 된다. 정답은 90° − 37° = 약 53°에 맞추는 것이다.
이유는 단순하다. Sky-Watcher EQ 웨지는 본래 Star Adventurer 트래커를 위해 설계되었는데, 반면 AZ-GTi를 이 웨지 위에 장착하면 RA축이 마운팅 면과 수직(90° 어긋남)으로 배치된다. 결과적으로 웨지에 인쇄된 위도 스케일은 실제 RA축 고도와 90° 어긋난 값을 가리키게 되며, 보정 공식이 90°에서 위도를 뺀 값이 된다.

한 번 맞춰두면 같은 관측지에서는 다시 조정할 일이 거의 없으니, 처음에 정확히 설정해두는 것이 좋다. 디지털 각도계를 RA축 샤프트(무게추 봉이 결합되는 부분)에 대보면 실제로 위도값이 나오는지 교차검증할 수 있다.
※ 위 세 항목은 Sky-Watcher 공식 매뉴얼에는 명시되지 않은 사용자 노하우다. Cloudy Nights, Waloszek, Skypointer Photography Blog 등 다수의 영문 사용자 커뮤니티에서 동일하게 확인된다.
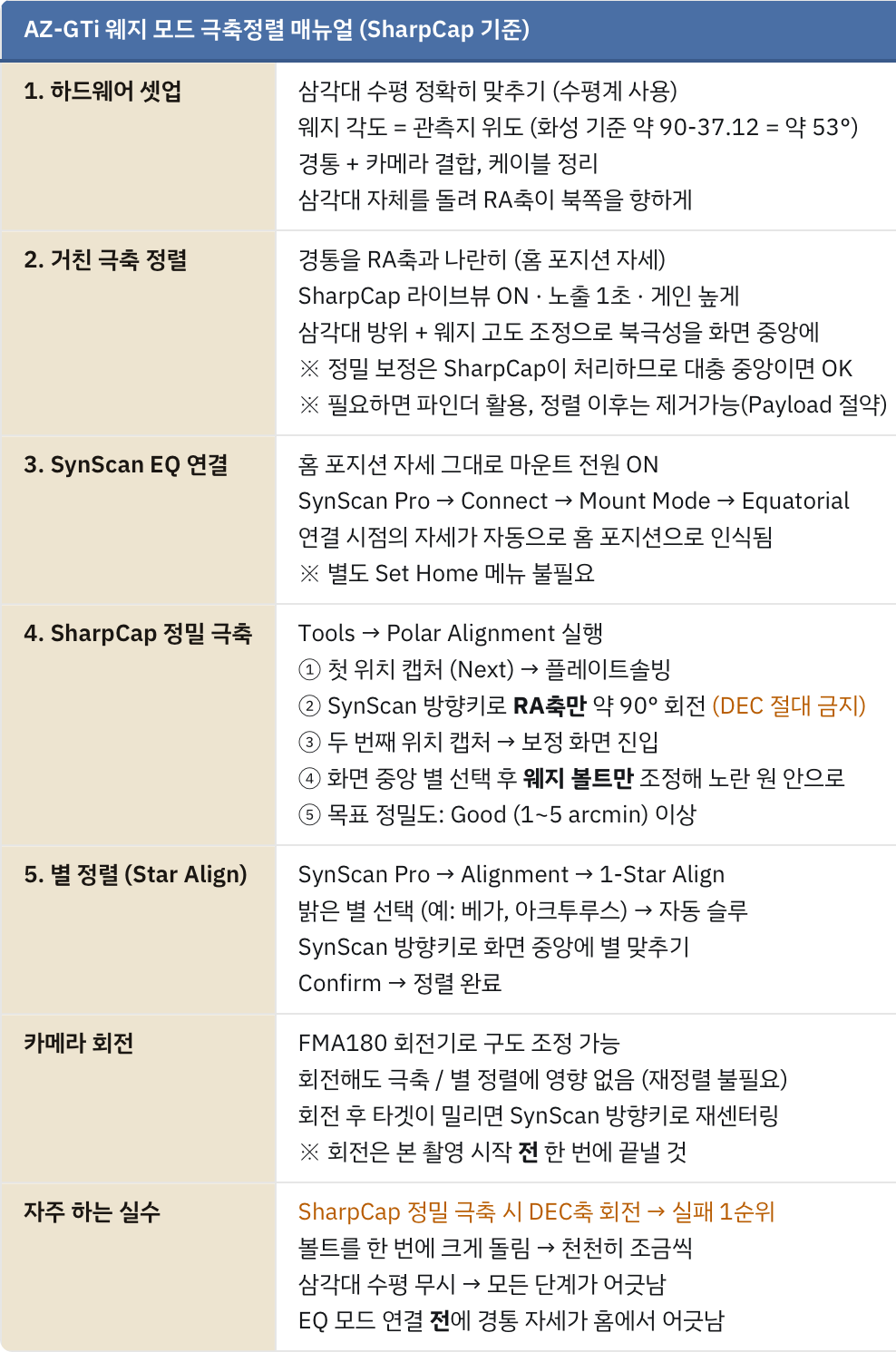
극축 정렬 방법 (SharpCap 기준)
| AZ-GTi 웨지 모드 극축정렬 매뉴얼 (SharpCap 기준) | |
| 1. 하드웨어 셋업 | 삼각대 수평 정확히 맞추기 (수평계 사용) 웨지 각도 = 관측지 위도 (화성 기준 약 90-37.12 = 약 53°) 경통 + 카메라 결합, 케이블 정리 삼각대 자체를 돌려 RA축이 북쪽을 향하게 |
| 2. 거친 극축 정렬 | 경통을 RA축과 나란히 (홈 포지션 자세) SharpCap 라이브뷰 ON · 노출 1초 · 게인 높게 삼각대 방위 + 웨지 고도 조정으로 북극성을 화면 중앙에 ※ 정밀 보정은 SharpCap이 처리하므로 대충 중앙이면 OK ※ 필요하면 파인더 활용, 정렬 이후는 제거가능(Payload 절약) |
| 3. SynScan EQ 연결 | 홈 포지션 자세 그대로 마운트 전원 ON SynScan Pro → Connect → Mount Mode → Equatorial 연결 시점의 자세가 자동으로 홈 포지션으로 인식됨 ※ 별도 Set Home 메뉴 불필요 |
| 4. SharpCap 정밀 극축 | Tools → Polar Alignment 실행 ① 첫 위치 캡처 (Next) → 플레이트솔빙 ② SynScan 방향키로 RA축만 약 90° 회전 (DEC 절대 금지) ③ 두 번째 위치 캡처 → 보정 화면 진입 ④ 화면 중앙 별 선택 후 웨지 볼트만 조정해 노란 원 안으로 ⑤ 목표 정밀도: Good (1~5 arcmin) 이상 |
| 5. 별 정렬 (Star Align) | SynScan Pro → Alignment → 1-Star Align 밝은 별 선택 (예: 베가, 아크투루스) → 자동 슬루 SynScan 방향키로 화면 중앙에 별 맞추기 Confirm → 정렬 완료 |
| 카메라 회전 | FMA180 회전기로 구도 조정 가능 회전해도 극축 / 별 정렬에 영향 없음 (재정렬 불필요) 회전 후 타겟이 밀리면 SynScan 방향키로 재센터링 ※ 회전은 본 촬영 시작 전 한 번에 끝낼 것 |
| 자주 하는 실수 | SharpCap 정밀 극축 시 DEC축 회전 → 실패 1순위 볼트를 한 번에 크게 돌림 → 천천히 조금씩 삼각대 수평 무시 → 모든 단계가 어긋남 EQ 모드 연결 전에 경통 자세가 홈에서 어긋남 |
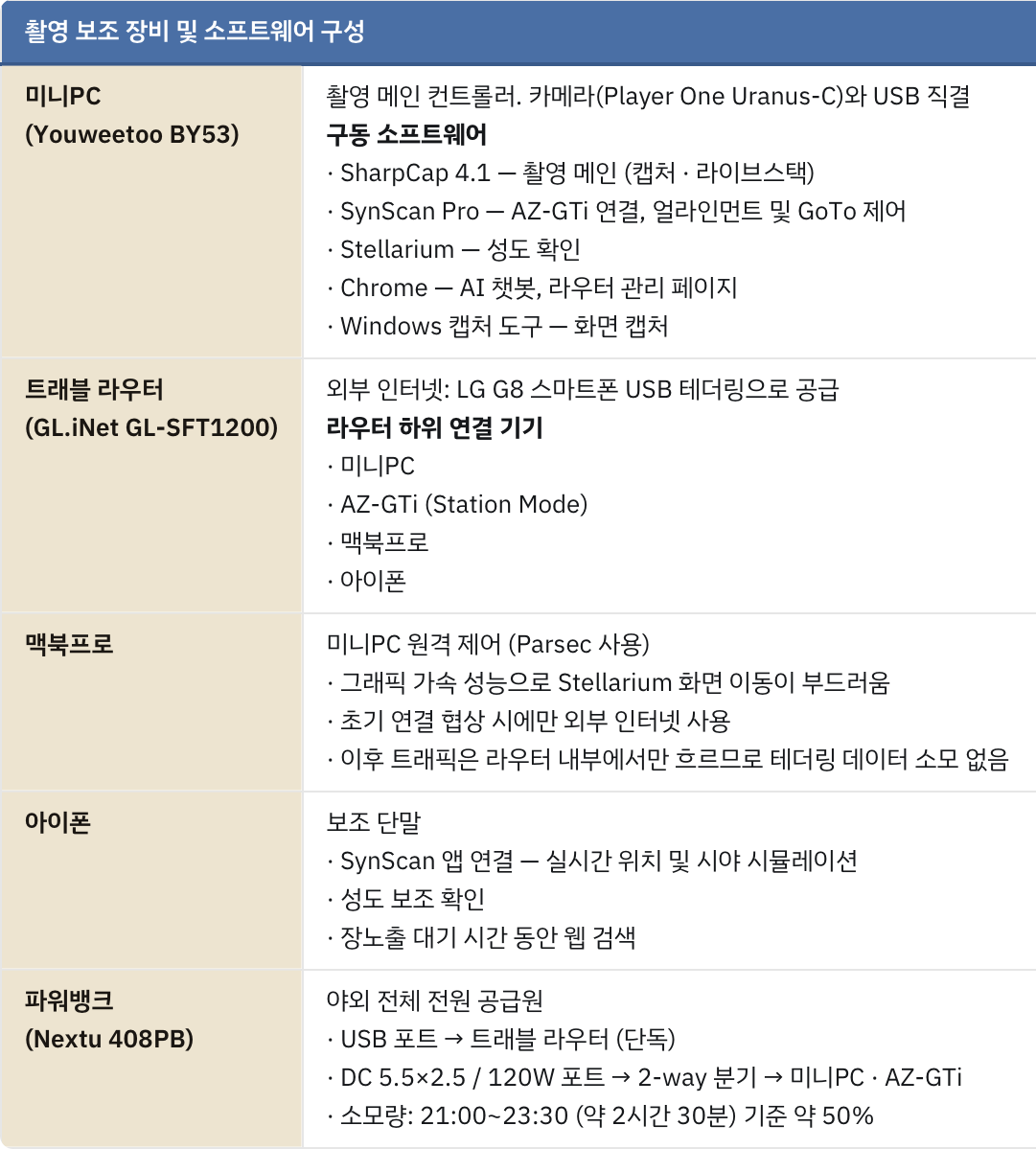
그 외 촬영 장비 설정
| 촬영 보조 장비 및 소프트웨어 구성 | |
| 미니PC (Youweetoo BY53) | 촬영 메인 컨트롤러. 카메라(Player One Uranus-C)와 USB 직결 구동 소프트웨어 · SharpCap 4.1 — 촬영 메인 (캡처 · 라이브스택) · SynScan Pro — AZ-GTi 연결, 얼라인먼트 및 GoTo 제어 · Stellarium — 성도 확인 · Chrome — AI 챗봇, 라우터 관리 페이지 · Windows 캡처 도구 — 화면 캡처 |
| 트래블 라우터 (GL.iNet GL-SFT1200) | 외부 인터넷: LG G8 스마트폰 USB 테더링으로 공급 라우터 하위 연결 기기 · 미니PC · AZ-GTi (Station Mode) · 맥북프로 · 아이폰 |
| 맥북프로 | 미니PC 원격 제어 (Parsec 사용) · 그래픽 가속 성능으로 Stellarium 화면 이동이 부드러움 · 초기 연결 협상 시에만 외부 인터넷 사용 · 이후 트래픽은 라우터 내부에서만 흐르므로 테더링 데이터 소모 없음 |
| 아이폰 | 보조 단말 · SynScan 앱 연결 — 실시간 위치 및 시야 시뮬레이션 · 성도 보조 확인 · 장노출 대기 시간 동안 웹 검색 |
| 파워뱅크 (Nextu 408PB) | 야외 전체 전원 공급원 · USB 포트 → 트래블 라우터 (단독) · DC 5.5×2.5 / 120W 포트 → 2-way 분기 → 미니PC · AZ-GTi · 소모량: 21:00~23:30 (약 2시간 30분) 기준 약 50% |
실전 돌입
웨지 볼트만으로 SharpCap에서 정밀하게 극축을 맞추는 과정은 분명히 연습이 필요한 부분이었다. 어제는 한 5~10분 정도 걸렸는 것 같은데, 특히 적위 쪽 볼트가 워낙 뻑뻑해서 '손맛'을 익히는 것이 쉽지는 않았다. 그래도 다음번에는 좀더 잘 할 수 있겠지...


맥북용 플레이트도 하나 알리에서 구매했고, 남는 삼각대에 세팅하니 딱 좋다.
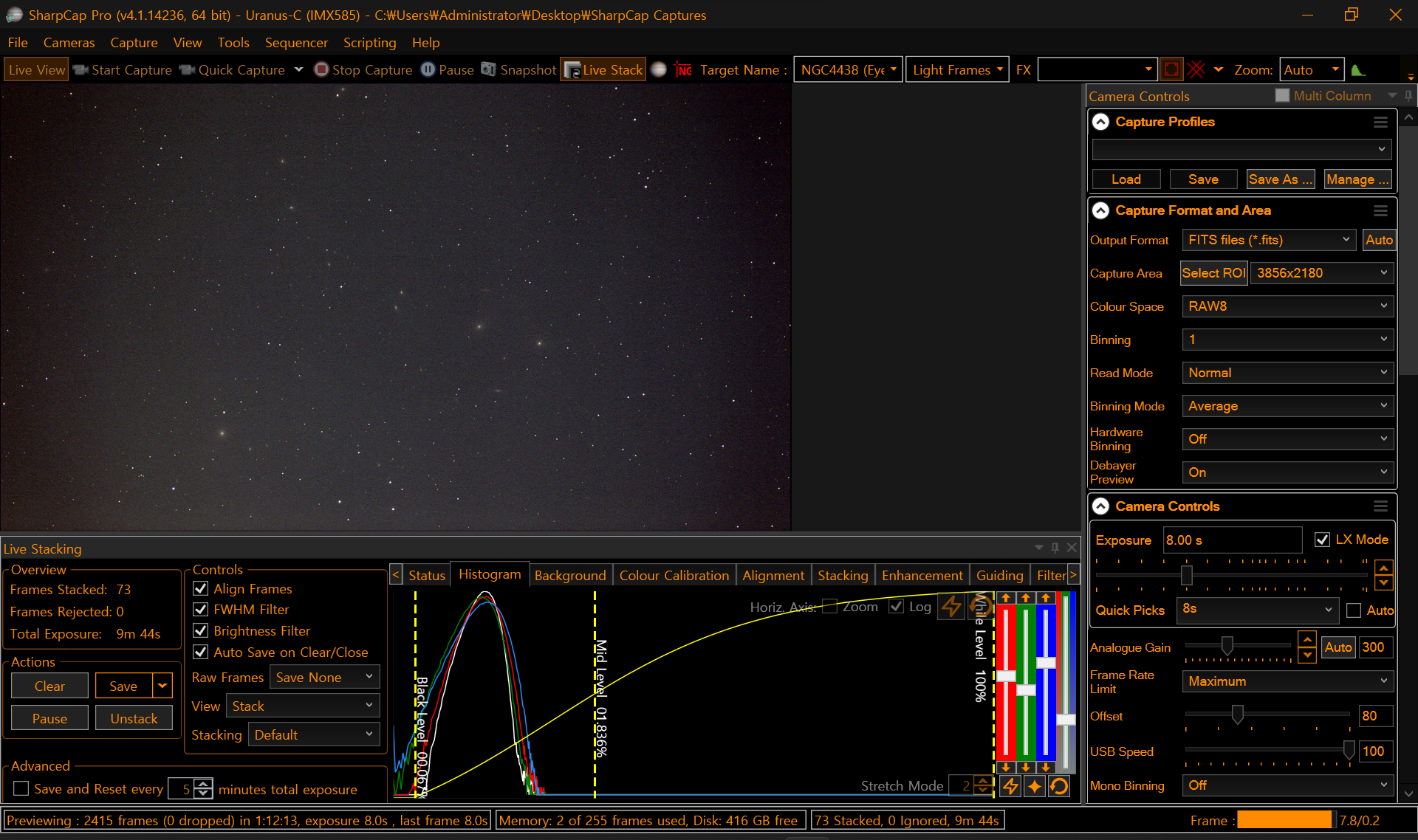

처녀자리 마카리안 체인(NGC4438-Centric) 우선은 고도가 매우 높았음에도 거의 상회전이 없다 - 즉 스태킹하면서 날라가는 부분이 없으니 1시간 노출이 가능하다. 그러나...사진은 망쳤다. 송화가루인지 렌즈에 앉은 초록 먼지들 때문에 스트래치를 올리니 온통 초록 동심원이 잔뜩...--;; 게다가 플랫도 안찍었고, 스트래치를 공격적으로 못쓰니, 세상 밑밑한 사진이 나왔다.
| 마카리안 체인 (Markarian's Chain) | 처녀자리 | |
| 촬영 일시 | 2026. 05. 16 · 23:31 KST |
| 촬영 장소 | 경기도 화성시 봉담읍 (아파트 단지 내 배드민턴장) · Bortle 8.6 |
| 망원경 | Askar FMA180 Pro · 180mm / F5.6 |
| 카메라 | Player One Uranus-C (IMX585, 컬러) |
| 필터 | Svbony UV/IR Cut |
| 노출 | 8초 × 450프레임 · 총 3600초 (약 60분) |
| 게인 / 오프셋 | 300 / 80 · 센서 온도 23.5°C |
| 마운트 | Sky-Watcher AZ-GTi · 적도의 모드 (Wedge) |
| 캘리브레이션 | 다크 미적용 · 플랫 미사용 · 핫픽셀 제거 적용 |
| 스태킹 | SharpCap 4.1 · Sigma Clipping · 별 정렬 |
| 후보정 | Siril · Crop · SPCC 컬러캘리브레이션 · GraXpert 배경추출 · 디노이징 VeraLux HyperMetric Stretch GIMP · Median Blur Pseudo-Flat · Levels |
비록 사진은 렌즈 관리를 잘못해서 먼지 때문에 사진은 망쳤지만, 적도의 마운트의 위력을 새삼 확인한 계기였다. 또 극축정렬이라는 말로만 들어도 까다롭고 도전의식을 꺾어버리는 스킬을 해냈다는 뿌듯함이 컸다.
Next Time...
적도의 사용의 산을 넘었기에 이제는 더 많은 대상을 더 예쁘게 촬영할 일만 남았다. 당분간은 '은하 1시간 노출'에 집중해 볼 요량이다. 광시야 렌즈로는 머리털자리 은하단에도 도전한다. 또하나는 플랫 촬영도 해야한다. 다크보다는 플랫이 촬영결과에 더 치명적 영향을 줄 수 있음을 느꼈기 때문이다. 알리에서 LED플랫패널을 사야하는데, 비싼 천문용을 살까, 그냥 가성비를 살까 고민이다.
그 외 몇 가지 차기 촬영 시 유의점을 정리하는 것으로 이번 포스티은 마무리하고자 한다.
- 촬영 직전 광학계 청소 + 광학면 가림 — 5월은 송화가루 절정. 에어블로어로 보정경 청소 후, 세팅 대기 중에는 비닐이나 가림막으로 위쪽 덮어두기.
- 마스터 플랫 만들기 — FMA180 Pro + Uranus-C + UV/IR Cut 셋업으로 마스터 플랫 한 번 만들어두면 비네팅·먼지·꽃가루 그림자가 한 번에 빠진다. 결로·미광까지는 못 잡지만 후처리 부담은 절반 이하로 줄어든다.
- RAW16을 캡처 프로파일 기본값으로 — 이번처럼 촬영 도중에 결정해야 하는 일 없게 SharpCap Capture Profile에 RAW16으로 저장해 두기.
- Brightness Filter는 수동 75~80% — Auto는 마카리안 체인처럼 별 검출이 들쭉날쭉한 영역에서 너무 빡빡하다. 처음부터 수동 설정으로 시작.
- Sigma Clipping 스태킹 모드 기본값화 — 가이드 없이 알트아즈/웻지로 8초 노출하면 일부 프레임에서 위성 트레일·핫픽셀·미세 추적 오차가 끼어든다. 기본 평균 스택보다 Sigma Clipping이 이런 이상치를 통계적으로 걸러주기 때문에, 클리어 후 처음부터 Sigma Clipping으로 시작. Initial Count 5, Sigma 3.0이 무난.
- 라이브 스택 중 Individual Frames 뷰 적극 활용 — 좌측 패널 View 드롭다운을 "Stack"에서 "Individual Frames"로 바꾸면 지금 들어오는 단일 프레임을 그대로 볼 수 있다. 채택률이 갑자기 떨어지거나 Brightness too low 경고가 뜰 때, Filter 그래프 분석 전에 Individual Frames로 1~2분 보면 원인(이슬, 박무, 초점 드리프트, 시야 벗어남)이 눈으로 바로 보인다. 진단 시간 절약.
- SPCC White Reference 구분 사용 — 갤럭시 대상에는 Average Spiral Galaxy, 별 영역에는 Average Star(G2V). 마카리안 체인은 갤럭시 기준이 정답.

![[EAA] M12 (NGC 6218) · 구상성단 | 뱀주인자리](/content/images/size/w720/2026/05/M12_260531_Stack_16bits_30frames_240s-1.png)
![[EAA] M10 (NGC 6254) · 구상성단 | 뱀주인자리](/content/images/size/w720/2026/05/M10_260531_Stack_16bits_30frames_240s-1.png)